

Boas
Aqui fica a 2 versão do controlo de motores com o L293D, este já com vídeo e com a placa em eagle, também com umas pequenas alterações no código, irão reparar de imediato quendo olharem para o código.
Já agora o PWM é uma abreviatura de (
Pulse Width Modulation ), serve para podermos controlar a velocidade de um motor de 0-255
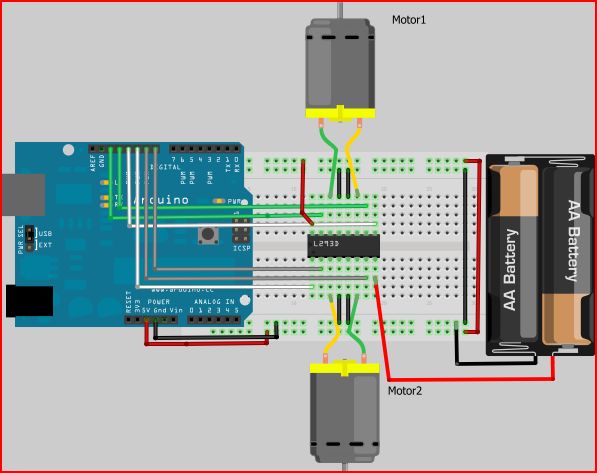
Esquema de Montagem
Manual da Placa de circuito impresso

Imagens da placa de circito impresso



Esta placa pode ser colucada em cima do arduino.
Código
-----------------------------------------
void setup()
{
Serial.begin(9600);
pinMode(13, OUTPUT);
pinMode(12, OUTPUT);
pinMode(11, OUTPUT);
pinMode(10, OUTPUT);
pinMode(9, OUTPUT);
pinMode(8, OUTPUT);
}
void loop()
{
digitalWrite(13,1); //Motor 1
digitalWrite(12,0); //Motor 1
digitalWrite(9,0); //Motor 2
digitalWrite(8,1);//Motor 2
analogWrite(11,50); //Motor 1 PWM
analogWrite(10,50); //Motor 2 PWM
delay (2000);
digitalWrite(13,HIGH); //Motor 1
digitalWrite(12,LOW); //Motor 1
digitalWrite(9,HIGH); //Motor 2
digitalWrite(8,LOW);//Motor 2
analogWrite(11,50); //Motor 1 PWM
analogWrite(10,50); //Motor 2 PWM
delay (2000);
digitalWrite(13,0); //Motor 1
digitalWrite(12,1); //Motor 1
digitalWrite(9,0); //Motor 2
digitalWrite(8,0);//Motor 2
analogWrite(11,50); //Motor 1 PWM
analogWrite(10,50); //Motor 2 PWM
delay (2000);
digitalWrite(13,1); //Motor 1
digitalWrite(12,0); //Motor 1
digitalWrite(9,0); //Motor 2
digitalWrite(8,0);//Motore2
analogWrite(11,20); //Motor 1 PWM
analogWrite(10,100); //Motor 2 PWM
delay (2000);
digitalWrite(13,LOW); //Motor 1
digitalWrite(12,HIGH); //Motor 1
digitalWrite(9,LOW); //Motor 2
digitalWrite(8,LOW);//Motor 2
analogWrite(11,100); //Motor 1 PWM
analogWrite(10,20); //Motor 2 PWM
}
-----------------------------------------
Links
Comprimentos Marco Joel
Videos
Placa em eagle
Datasheet do drive L293D:










Obrigado por esse post..
ResponderExcluirSó uma correcção: PWM significa Pulse Width Modulation
ResponderExcluirObrigado pela atenção...O post foi corrigido ...
ResponderExcluir